Optymalne połączenia regionów
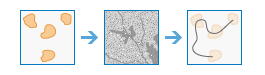
To narzędzie oblicza sieć połączeń o najmniejszym koszcie między dwoma lub większą liczbą regionów wejściowych.
Poniżej przedstawiono następujące przykładowe zastosowania:
- Model przydatności — na podstawie modelu przydatności zidentyfikowano 10 najlepszych płatów siedliskowych rysi. Rysie powinny mieć możliwość przemieszczania się między płatami siedliskowymi przy wykorzystaniu najbardziej efektywnej sieci korytarzy ekologicznych, dzięki czemu zostanie zachowana genetyczna różnorodność metapopulacji.
- Pozyskiwanie drewna — w procesie pozyskiwania drewna należy utworzyć najbardziej efektywną kosztowo sieć dróg leśnych, które ułatwią pozyskiwanie tego surowca.
- Utrzymywanie pokoju — podczas rozmieszczania wojskowych sił pokojowych zidentyfikowano pięć obszarów, na których zostaną rozmieszczeni żołnierze i personel pomocniczy. Konieczne jest wyznaczenie optymalnych tras zaopatrzeniowych łączących te bazy.
Jeśli zaznaczona jest opcja Użyj bieżącego zasięgu mapy, analizowane będą tylko obiekty warstwy wejściowej widoczne w bieżącym zasięgu mapy. Jeśli opcja ta nie jest zaznaczona, przeanalizowane zostaną wszystkie obiekty w obu warstwach wejściowych, nawet jeśli znajdują się one poza bieżącym zasięgiem mapy.
Wybierz raster lub obiekt regionu
Regiony wejściowe, które mają być połączone optymalną siecią.
Jeśli dane wejściowe regionu to raster, regiony są definiowane przez grupy ciągłych (przylegających do siebie) komórek o tych samych wartościach. Każdy region musi mieć unikalny numer. Komórki niebędące częścią żadnego regionu muszą mieć wartość Brak danych. Raster musi być typu całkowitoliczbowego, a wartości mogą być dodatnie lub ujemne.
Jeśli dane wejściowe regionu mają postać warstwy obiektowej, może to być warstwa punktowa, liniowa lub poligonowa. Warstwy poligonowe regionów nie mogą składać się z poligonów wieloczęściowych.
Wybierz raster lub obiekt barier (opcjonalnie)
Zestaw danych definiujący bariery.
W przypadku rastra typem wejściowym może być liczba całkowita lub zmiennoprzecinkowa. Wszystkie komórki, które zawierają wartości (w tym wartość zero), będą traktowane jako bariery. Wszystkie komórki zawierające wartość NoData nie będą traktowane jako bariery.
W przypadku obiektu danymi wejściowymi mogą być punkty, linie lub poligony.
Wybierz raster kosztów (opcjonalnie)
Raster definiujący impedancję (koszt) ruchu planimetrycznego między poszczególnymi komórkami.
Wartość w każdej lokalizacji komórki reprezentuje odległość kosztu na jednostkę na potrzeby poruszania się przez tę komórkę. Wartość każdej lokalizacji komórki jest mnożona przez rozdzielczość komórki, a jednocześnie następuje kompensacja ruchu ukośnego, aby uzyskać łączny koszt poruszania się przez komórkę.
Wartości rastra kosztów mogą być całkowitoliczbowe lub zmiennoprzecinkowe, ale nie mogą być ujemne ani równe zero (koszt nie może być wartością ujemną ani mieć wartość zerową).
Metoda wyznaczania odległości (opcjonalnie)
Wskazuje, czy odległości mają być obliczane przy użyciu metody planarnej (płaska powierzchnia Ziemi), czy geodezyjnej (elipsoida).
- Planarna — obliczenia odległości będą wykonywane na odwzorowanej płaskiej powierzchni przy użyciu 2-wymiarowego kartezjańskiego układu współrzędnych. To jest metoda domyślna.
- Geodezyjna — obliczenia odległości będą wykonywane na elipsoidzie. Dzięki temu wyniki nie zmieniają się w zależności od wejściowego lub wynikowego odwzorowania.
Połączenia w obrębie regionów (opcjonalnie)
Decyduje o tym, czy ścieżki będą kontynuować swój bieg i łączyć się w obrębie regionów wejściowych.
- Generuj połączenia — ścieżki będą kontynuować swój bieg w obrębie regionów wejściowych, łącząc wszystkie ścieżki, które wchodzą do regionu. Jest to opcja domyślna.
- Brak połączeń — ścieżki będą kończyć się na krawędziach regionów wejściowych i nie będą kontynuować swojego biegu ani łączyć się w ich obrębie.
Nazwa wynikowej warstwy obiektowej linii optymalnego połączenia
Nazwa warstwy, która zostanie utworzona w obszarze Moje zasoby i dodana do mapy. Nazwa domyślna jest tworzona w oparciu o nazwę narzędzia i nazwę warstwy wejściowej. Jeśli warstwa już istnieje, wyświetlony zostanie komunikat z monitem o podanie innej nazwy.
Ta warstwa to wynikowa warstwa obiektów liniowych łączących poszczególne regiony wejściowe.
Każda ścieżka (lub linia) jest unikalnie numerowana, a w dodatkowych polach tabeli atrybutów przechowywane są określone informacje o ścieżce. Te dodatkowe pola to:
- PATHID– Unikalny identyfikator ścieżki
- PATHCOST– Łączna zakumulowana odległość lub koszt ścieżki
- REGION1– Pierwszy z łączonych przez ścieżkę regionów
- REGION2– Drugi z łączonych przez ścieżkę regionów
Ponieważ każda ścieżka jest reprezentowane przez unikalną linię, w lokalizacjach, w których ścieżki biegną tą samą trasą, będzie istnieć wiele linii.
Za pomocą listy rozwijanej Zapisz wynik w można podać nazwę folderu w obszarze Moje zasoby, gdzie zostanie zapisany wynik.
Nazwa wynikowej warstwy obiektowej połączeń sąsiadujących (opcjonalnie)
Nazwa warstwy, która zostanie utworzona w obszarze Moje zasoby i dodana do mapy. Nazwa domyślna jest tworzona w oparciu o nazwę narzędzia i nazwę warstwy wejściowej. Jeśli warstwa już istnieje, wyświetlony zostanie komunikat z monitem o podanie innej nazwy.
Ta warstwa to wynikowa warstwa obiektów liniowych, która identyfikuje wszystkie ścieżki prowadzące z każdego regionu do najbliższych (lub najkorzystniejszych kosztowo) regionów sąsiadujących.
Każda ścieżka (lub linia) jest unikalnie numerowana, a w dodatkowych polach tabeli atrybutów przechowywane są określone informacje o ścieżce. Te dodatkowe pola to:
- PATHID– Unikalny identyfikator ścieżki
- PATHCOST– Łączna zakumulowana odległość lub koszt ścieżki
- REGION1– Pierwszy z łączonych przez ścieżkę regionów
- REGION2– Drugi z łączonych przez ścieżkę regionów
Ponieważ każda ścieżka jest reprezentowane przez unikalną linię, w lokalizacjach, w których ścieżki biegną tą samą trasą, będzie istnieć wiele linii.
Za pomocą listy rozwijanej Zapisz wynik w można podać nazwę folderu w obszarze Moje zasoby, gdzie zostanie zapisany wynik.