래스터 분석 도구에서는 ArcGIS Image Server를 사용하여 대용량 래스터 데이터셋을 분석할 수 있습니다. 또한 서버의 성능을 활용하여 데이터를 좀 더 빠르게 분석할 수 있습니다.현재 Portal for ArcGIS 웹 UX에서 제공되는 도구집합은 데이터 요약, 패턴 분석, 근접도 사용, 이미지 분석, 터레인 분석, 데이터 관리, 딥러닝, 다차원 분석입니다.
데이터 요약
이러한 도구를 사용하여 사용자가 정의한 영역 경계(구역) 내의 래스터 레이어에 대한 통계를 계산합니다.
- 다음 범위 내 래스터 요약 - 정의된 영역 경계 내에 속하는 래스터 셀에 대한 통계를 계산합니다.
- 테이블 형식 구역 통계는 다른 데이터셋의 구역 내에서 래스터 값을 요약하고 결과를 테이블에 보고합니다.
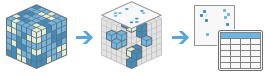
다음 범위 내 래스터 요약(Summarize Raster Within) |
|
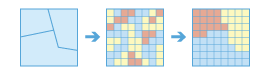
이 도구는 다른 데이터셋의 구역 내에서 래스터 값을 요약합니다.
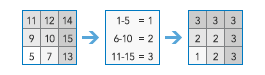
테이블 구역 통계(Zonal Statistics as Table) |
|
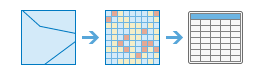
이 도구는 다른 데이터셋의 구역 내에서 래스터 값을 요약하고 결과를 테이블에 보고합니다.
패턴 분석
이러한 도구는 데이터에 있는 공간 패턴을 식별, 수량화 및 시각화합니다.
- 밀도 계산은 일부 현상의 알려진 수량을 이용하여 이러한 수량을 맵에서 분산시켜 밀도 맵을 생성합니다.
- 포인트 내삽은 포인트 컬렉션에서 발견된 측정을 기반으로 한 새 위치에서 값을 예측합니다.
밀도 계산(Calculate Density) |
|
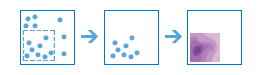
밀도 분석은 일부 현상의 알려진 수량을 이용하여 이러한 수량을 맵에서 분산시켜 밀도 맵을 생성합니다. 이 도구를 사용하여 낙뢰 또는 토네이도, 보건 시설로의 접근성 및 인구 밀도 등을 표시할 수 있습니다.
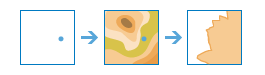
포인트 보간(Interpolate Points) |
|
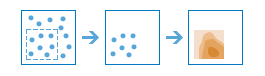
이 도구를 이용하면 여러 포인트에서 발견된 측정값을 기반으로 새 위치에서의 값을 예측할 수 있습니다. 이 도구는 각 포인트에서 값이 있는 포인트 데이터를 가져가 예측 값으로 분류된 영역을 반환합니다. 이 도구를 사용하여 개별 우량계에서 수행된 측정을 기반으로 하천에서 강우량 수준을 예측할 수 있습니다.
인접도 사용
공간 분석에서 가장 일반적으로 제기되는 질문 중 하나인 "무엇과 무엇이 인접합니까?" 및 "최적 경로는 무엇입니까"라는 몇몇 질문에 대한 답을 찾는데 사용하는 도구입니다.
- 거리 계산은 하나 또는 여러 원본으로부터의 유클리드 거리, 방향 및 할당을 계산합니다.
- 최적 이동 비용 네트워크 결정은 입력 영역 집합으로부터의 최적 비용 네트워크를 계산합니다.
- 폴리라인으로의 이동 비용 경로 결정은 원본과 알려진 목적지 간의 최저 비용 폴리라인 경로를 계산합니다.
- 거리 누적각 셀에 대해 직선 거리, 비용 거리, 실제 표면 거리, 수직 및 수평 계수를 감안하여 원본까지의 누적 거리를 계산합니다.
- 거리 할당은 각 셀에 대해 직선 거리, 비용 거리, 실제 표면 거리, 수직 및 수평 계수를 기반으로 제공된 원본까지의 거리 할당을 계산합니다.
- 라인 형식 최적 경로는 목적지에서 시작 지점까지의 최적 경로를 라인 형식으로 계산합니다.
- 래스터 형식 최적 경로는 목적지에서 시작 지점까지의 최적 경로를 래스터 형식으로 계산합니다.
- 최적 지역 연결은 두 개 이상의 입력 지역 간의 최적 연결 네트워크를 계산합니다.
거리 계산(Calculate Distance) |

|
이 도구는 하나 또는 여러 원본으로부터의 유클리드 거리, 방향 및 할당을 계산합니다.
최적 이동 비용 네트워크 결정(Determine Optimum Travel Cost Network) |
|
이 도구는 입력 지역의 집합으로부터의 최적 비용 네트워크를 계산합니다.
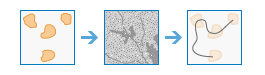
폴리라인으로 이동 비용 경로 결정(Determine Travel Cost Path As Polyline) |
|
이 도구는 목적지와 원본 간의 최저 비용 폴리라인 경로를 계산합니다.
거리 누적(Distance Accumulation) |
|
이 도구는 각 셀에 대해 직선 거리, 비용 거리, 실제 표면 거리, 수직 및 수평 계수를 감안하여 원본까지의 누적 거리를 계산합니다.
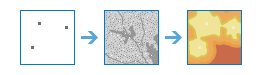
거리 할당(Distance Allocation) |
|
이 도구는 각 셀에 대해 직선 거리, 비용 거리, 실제 표면 거리, 수직 및 수평 계수를 기반으로 제공된 원본까지의 거리 할당을 계산합니다.
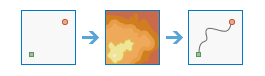
라인 형식 최적 경로(Optimal Path As Line) |
|
이 도구는 목적지에서 원본까지의 최적 경로를 라인 형식으로 계산합니다.
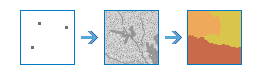
래스터 형식 최적 경로(Optimal Path As Raster) |
|
이 도구는 목적지에서 원본까지의 최적 경로를 래스터 형식으로 계산합니다.
최적 영역 연결(Optimal Region Connections) |
|
이 도구는 두 개 이상의 입력 영역 간의 최적 연결 네트워크를 계산합니다.
이미지 분석
이미지 분석 도구 범주의 다음 도구는 이미지를 분석하는 데 유용합니다.
- 식생 모니터링은 밴드에 대한 산술 연산을 기반으로 이미지 내의 상대적인 식생 커버리지를 감지합니다. 이미지 분석에 여러 식생 지수를 사용할 수 있습니다.
식생 모니터링 |
|
멀티밴드 래스터 레이어 밴드에 대해 산술 연산을 수행하여 식생 커버리지 정보를 나타냅니다.
지형 분석(Analyze Terrain)
이러한 도구는 래스터 표면을 분석하도록 도와줍니다.
- 경사 계산은 지형의 기울기를 계산합니다.
- 경사면 방향 취득은 각 위치에서 가장 가파른 경사의 방향을 계산합니다.
- 가시권역 생성은 경관의 모든 포인트에서 볼 수 있는 항목을 식별합니다.
- 유역은 표면에서 식별된 위치 위의 기여 영역을 계산합니다.
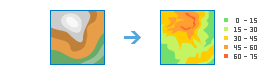
경사 계산(Calculate Slope) |
|
입력 고도 데이터의 경사를 보여주는 표면을 식별합니다. 경사는 각 수치 표고 모델(DEM) 셀에 대한 고도의 변경율을 나타냅니다.
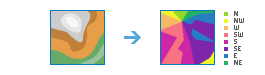
경사면 방향 취득(Derive Aspect) |
|
이웃 각 셀에서 값 변화의 최대 속도의 내리막 방향을 확인합니다. 경사면 방향은 경사 방향으로 생각할 수 있습니다.
가시권역 생성(Create Viewshed) |
|
관찰자 집합이 볼 수 있는 래스터 표면의 위치를 결정합니다.
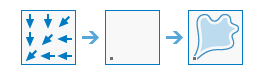
유역(Watershed) |
|
래스터의 셀 집합 위에 기여 영역을 결정합니다.
데이터 관리하기(Manage Data)
지리 데이터의 일상적인 관리 및 분석 전 데이터 통합에 사용되는 도구입니다.
- 래스터 추출 - 향후 분석을 위해 래스터 데이터셋에서 일부를 클립합니다.
- 값 리맵 - 다른 값을 래스터 셀에 할당합니다.
- 피처를 래스터로 변환 - 벡터 데이터를 래스터화합니다.
- 래스터를 피처로 변환 - 래스터 데이터를 벡터화합니다.
- 샘플 - 한 래스터 또는 래스터 집합의 데이터를 정의된 위치에 추출합니다.
래스터 추출 |
|
다른 데이터셋의 값, 쉐이프 또는 범위를 기반으로 래스터에서 셀을 추출합니다.
값 리맵 |
|
개별 셀 값 또는 일련의 셀 값을 새 값으로 변경합니다.
피처를 래스터로 변환 |
|
기존 피처 데이터셋에서 새 래스터 데이터셋을 생성합니다.
래스터를 피처로 변환(Convert Raster To Feature) |
|
기존 래스터 데이터셋에서 새 피처 데이터셋을 생성합니다.
샘플 |
|
한 래스터 또는 래스터 집합에서 추출한 데이터 값이 포함된 테이블 또는 포인트 피처 클래스를 정의된 위치에 생성합니다.
딥러닝(Deep Learning)
이러한 도구는 이미지의 특정 피처를 감지하거나 분류하여 래스터 데이터셋의 픽셀을 분류하는 데 사용됩니다. 딥러닝은 인공 지능 머신 러닝 방법의 유형으로, 각 레이어가 하나 이상의 고유한 피처를 이미지에서 추출할 수 있는 신경망에서 다중 레이어를 사용하여 이미지의 피처를 감지합니다. 이러한 도구는 TensorFlow, CNTK, Keras와 같은 서드 파티 딥러닝 프레임워크의 특정 피처와 결과 피처, 클래스 맵을 감지하도록 교육된 모델을 사용합니다.
- 딥러닝을 사용하여 픽셀 분류는 숙련된 딥러닝 모델을 사용하여 분류된 래스터를 생성합니다.
- 딥러닝을 사용하여 객체 감지는 숙련된 딥러닝 모델을 사용하여 입력 래스터에서 찾는 객체를 포함하는 피처 클래스를 생성합니다.
- 딥러닝을 사용하여 객체 분류는 입력 래스터의 각 입력 객체에 대해 숙련된 딥러닝 모델을 사용하여 클래스 레이블이 할당되어 있는 피처 클래스 또는 테이블을 생성합니다.
딥러닝을 사용한 픽셀 분류(Classify Pixels Using Deep Learning) |
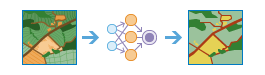
|
이 도구는 입력 래스터에서 숙련된 딥러닝 모델을 실행하여 분류 래스터를 생성하며 각 유효 픽셀에는 할당된 클래스 레이블이 있습니다.
딥러닝을 사용한 객체 감지(Detect Objects Using Deep Learning) |
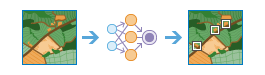
|
이 도구는 입력 래스터에서 숙련된 딥러닝 모델을 실행하여 찾는 객체가 포함된 피처 클래스를 생성합니다. 피처는 찾은 객체 주변의 경계 상자 또는 폴리곤이거나, 객체 중심에 있는 포인트일 수 있습니다.
딥러닝을 사용한 객체 분류(Classify Objects Using Deep Learning) |
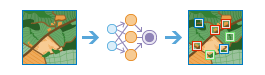
|
이 도구는 입력 래스터와 선택적 피처 클래스에 대해 숙련된 딥러닝 모델을 실행하여 피처 클래스나 테이블을 생성하며 각 입력 객체에는 할당된 클래스 레이블이 있습니다.
다차원 분석
다차원 분석 도구집합의 도구를 사용하면 다중 변수 및 차원에 걸쳐 과학 데이터를 분석할 수 있습니다.
다차원 데이터는 다양한 시간, 깊이, 높이에서 캡처된 데이터를 나타냅니다. 해당 유형의 데이터는 대기, 해양, 지구 과학 분야에서 일반적으로 사용됩니다. 이 도구집합을 사용하면 netCDF, HDF, GRIB, 다차원 모자이크 데이터셋, Esri의 클라우드 래스터 형식(CRF)을 포함한 여러 형식으로 다차원 래스터 데이터를 분석할 수 있습니다.
다음 테이블에는 다차원 분석 도구와 각각에 대한 간략한 설명이 나와 있습니다.
- 다차원 래스터 집계는 차원에 따라 기존 다차원 래스터 변수를 집계하여 다차원 래스터 데이터셋을 생성합니다.
- 다차원 이상치 생성은 다차원 래스터에서 각 슬라이스에 대한 이상치를 계산하여 다차원 래스터를 생성합니다.
- 추세 래스터 생성은 다차원 래스터에 있는 하나 이상의 변수에 대해 디멘전에 따라 각 픽셀의 추세를 추정합니다.
- 추세 래스터를 사용하여 예측은 추세 래스터 생성 도구의 결과 추세 래스터를 사용하여 예측 다차원 래스터를 계산합니다.
- 인수 통계 찾기는 다차원 또는 다중밴드 래스터의 각 픽셀에 대해 지정 통계에 도달된 디멘전 값이나 밴드 색인을 추출합니다.
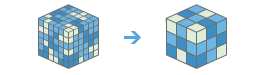
다차원 래스터 집계 |
|
이 도구는 차원에 따라 기존 다차원 래스터 변수를 집계하여 다차원 래스터 데이터셋을 생성합니다.
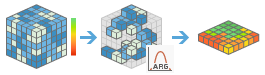
인수 통계 찾기 |
|
이 도구는 다차원 또는 다중밴드 래스터의 각 픽셀에 대해 지정 통계에 도달된 디멘전 값이나 밴드 색인을 추출합니다.
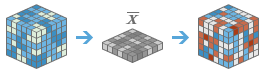
다차원 이상치 생성 |
|
이 도구는 다차원 래스터에서 각 슬라이스에 대한 이상치를 계산하여 다차원 래스터를 생성합니다.
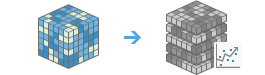
추세 래스터 생성(Generate Trend Raster) |
|
이 도구는 다차원 래스터에 있는 하나 이상의 변수에 대해 디멘전에 따라 각 픽셀의 추세를 추정합니다.
추세 래스터를 사용하여 예측 |
|
이 도구는 추세 래스터 생성 도구의 결과 추세 래스터를 사용하여 예측 다차원 래스터를 계산합니다.