Optimaaliset alueen yhteydet
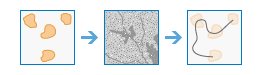
Tämä työkalu laskee optimaalisen yhteysverkoston kahden tai useamman lähtöalueen välillä.
Esimerkkisovelluksia ovat mm. seuraavat:
- Sopivuusmalli – sopivuusmallista on tunnistettu 10 parasta elinaluetta punailveksille. Haluat, että punailvekset voivat siirtyä alueiden välillä tehokkaimpien villieläinkäytävien kautta, jotta monimuotoisuus säilyy metapopulaatiossa.
- Puunkorjuu – puunkorjuussa haluat luoda kustannustehokkaimman ajourien verkoston, joiden avulla puutavara kerätään.
- Rauhanturvaaminen – armeijan rauhanturvaamistoimissa olet tunnistanut viisi aluetta, joihin voit sijoittaa joukkoja ja henkilökuntaa. Haluat kehittää optimaalisesti yhdistetyt jakelureitit tukikohtien välillä.
Jos Käytä nykyistä karttalaajuutta -asetus on valittuna, vain lähtökarttatasoissa olevat, nykyisessä karttalaajuudessa näkyvät sijainnit analysoidaan. Jos toimintoa ei ole valittu, kaikki molempien lähtökarttatasojen sijainnit analysoidaan – myös ne, jotka ovat nykyisen karttalaajuuden ulkopuolella.
Valitse aluerasteri tai -kohde
Lähtöalueet, jotka optimaalinen verkosto yhdistää.
Jos lähtöalue on rasteri, alueet määritetään niiden ryhmien pohjalta, joiden vierekkäisissä soluissa on sama arvo. Jokaisella alueella on oma numeronsa. Jos solu ei kuulu mihinkään alueeseen, se on yhtä kuin NoData. Rasterityypin on oltava kokonaisluku, ja arvot voivat olla joko positiivisia tai negatiivisia.
Jos lähtöalue on kohde, se voi olla piste, viiva tai alue. Aluekohteista muodostuvat alueet eivät voi koostua moniosaisista alueista.
Valitse esterasteri tai kohde (valinnainen)
Aineistoryhmä, joka määrittää esteet.
Lähtöaineiston tyyppi voi rasteria varten olla joko kokonaisluku tai liukuluku. Kaikkia soluja, joilla on arvo (mukaan lukien nolla), käsitellään esteinä. Soluja, joiden arvona on NoData, ei käsitellä esteinä.
Kohteen lähtöaineisto voi olla piste, viiva tai aluekohde.
Valitse kustannusrasteri (valinnainen)
Rasteri, joka määrittää impedanssin tai kustannuksen, jotta se voi liikkua planimetrisesti jokaisen solun läpi.
Kunkin solusijainnin arvo edustaa yksikkökohtaisen kustannuksen välimatkaa solun kautta siirtymiseksi. Kunkin solusijainnin arvo kerrotaan solun resoluutiolla diagonaalista liikettä kompensoimalla, jotta saadaan selville solun läpikulun aiheuttamat kustannukset.
Kustannusrasterin arvo voi olla kokonaisluku tai liukuluku, mutta se ei voi olla negatiivinen eikä nolla (kustannus ei voi olla negatiivinen eikä nolla).
Etäisyysmenetelmä (valinnainen)
Määrittää, lasketaanko etäisyys planaarisen (litteä maa) tai geodeettisen (ellipsoidi) menetelmän avulla.
- Planaarinen – etäisyyslaskenta suoritetaan projisoidusta litteästä tasosta karteesisen 2D-koordinaatiston avulla. Tämä on oletusmenetelmä.
- Geodeettinen – etäisyyslaskenta suoritetaan ellipsoidille. Siksi tulokset eivät muutu lähtöaineiston tai tulosaineiston projisoinnista huolimatta.
Yhteydet alueissa (valinnainen)
Määrittää, jatkuvatko polut ja yhdistetäänkö ne lähtöaineiston alueilla.
- Luo yhteydet – polut jatkuvat lähtöaineiston alueilla, jotta kaikki alueeseen liittyvät polut yhdistetään. Tämä on oletusarvo.
- Ei yhteyksiä – polut päättyvät lähtöaineiston alueiden reunoihin eivätkä ne jatku tai yhdisty niihin.
Tuloksena oleva optimaalisten yhdistyvyysviivojen kohdekarttatason nimi
Sen karttatason nimi, joka luodaan Oma sisältö -kohtaan ja lisätään karttaan. Oletusnimi perustuu työkalun nimeen ja lähtökarttatason nimeen. Jos taso on jo luotu, sinua pyydetään antamaan toinen nimi.
Tämä karttataso on tulosviivakohde, joka yhdistää kunkin lähtöaineiston alueen.
Jokainen polku (tai rivi) on numeroitu yksilöllisesti, ja ominaisuustietotaulun lisäkentät sisältävät tietyt polkua koskevat tiedot. Lisäkentät ovat seuraavat:
- PATHID– polun yksilöllinen tunnus
- PATHCOST– polun kumulatiivinen kokonaisetäisyys tai -kustannus
- REGION1– ensimmäinen alue, johon polku yhdistyy
- REGION2– toinen alue, johon polku yhdistyy
Koska kutakin polkua edustaa yksilöllinen viiva, sijainneissa, joissa polut kulkevat samalla reitillä, on useita rivejä.
Voit määrittää kansion nimen Oma sisältö -osiossa, johon tulos tallennetaan avattavan Tallenna tulos kohteeseen -valikon avulla.
Tuloksena oleva viereisten yhteyksien kohdekarttatason nimi (valinnainen)
Sen karttatason nimi, joka luodaan Oma sisältö -kohtaan ja lisätään karttaan. Oletusnimi perustuu työkalun nimeen ja lähtökarttatason nimeen. Jos taso on jo luotu, sinua pyydetään antamaan toinen nimi.
Tämä karttataso on tulosviivakohde, joka tunnistaa kunkin alueen kaikki polut lähimpään tai pienimmän kustannuksen naapuriin.
Jokainen polku (tai rivi) on numeroitu yksilöllisesti, ja ominaisuustietotaulun lisäkentät sisältävät tietyt polkua koskevat tiedot. Lisäkentät ovat seuraavat:
- PATHID– polun yksilöllinen tunnus
- PATHCOST– polun kumulatiivinen kokonaisetäisyys tai -kustannus
- REGION1– ensimmäinen alue, johon polku yhdistyy
- REGION2– toinen alue, johon polku yhdistyy
Koska kutakin polkua edustaa yksilöllinen viiva, sijainneissa, joissa polut kulkevat samalla reitillä, on useita rivejä.
Voit määrittää kansion nimen Oma sisältö -osiossa, johon tulos tallennetaan avattavan Tallenna tulos kohteeseen -valikon avulla.